김탑은 TV를 사러 인터넷 쇼핑몰에 들어갔다. 쇼핑을 하던 중에, TV의 크기는 그 TV의 대각선 길이로 나타낸다는 것을 알았다. 하지만, 김탑은 대각선의 길이가 같다고 해도, 실제 TV의 크기는 다를 수도 있다는 사실에 직접 TV를 보러갈걸 왜 인터넷 쇼핑을 대각선의 길이만 보고있는지 후회하고 있었다.
인터넷 쇼핑몰 관리자에게 이메일을 보내서 실제 높이와 실제 너비를 보내달라고 했지만, 관리자는 실제 높이와 실제 너비를 보내지 않고 그것의 비용을 보내왔다.
TV의 대각선 길이와, 높이 너비의 비율이 주어졌을 때, 실제 높이와 너비의 길이를 출력하는 프로그램을 작성하시오.
입력:
첫째 줄에 TV의 대각선 길이, TV의 높이 비율, TV의 너비 비율이 공백 한 칸을 사이에 두고 주어진다. 대각선 길이는 5보다 크거나 같고, 1,000보다 작거나 같은 자연수, 높이 비율은 1보다 크거나 같고, 99보다 작거나 같은 자연수 너비 비율은 2보다 크거나 같고, 100보다 작거나 같은 자연수이다. 너비 비율은 항상 높이 비율보다 크다.
출력:
첫째 줄에 TV의 높이와 TV의 너비를 공백 한 칸을 이용해서 구분지은 후 출력한다. 만약 실제 TV의 높이나 너비가 소수점이 나올 경우에는 그 수보다 작으면서 가장 큰 정수로 출력한다. (예)1.7->1
풀이방법:
높이와 너비의 비율이 주어졌으므로 이들의 비율 1에 해당하는 r을 구하면 된다. 이 r은 대각선의 길이로 구할 수 있게 된다. 너비를 x, 높이를 y라고 했을 때, x2+y2=기울기2 를 만족하고, x:y=a:b 의 비율을 만족시키는 r이 있다고 하자.
Youtube에 있는 David Silver의 Reinforcement Learning 강의를 보고 작성하였습니다.
Model Free Prediction
Model Free : MDP에 대한 정보가 없는 경우, 즉 environment에 대한 정보를 가지고 있지 않다.
Prediction : value function을 학습하는 것
즉 Model Free Prediction은 MDP에 대한 정보가 없을 때 value function을 학습해야 하는 문제이고, 다음 장에서 Model Free Control에 대해서 알아보도록 한다.
이번 강의에서 소개한 Model Free Prediction 방법으로 크게 Monte-Carlo Learning(MC), Temporal-Difference Learning(TD)가 있다.
Monte-Carlo Learning
몬테 카를로 방법(다음 부터 MC라 부른다.)은 episode들로 부터 직접적으로 학습한다. 즉 모두 종료가 되는 episode들의 return의 평균을 통해서 학습을 진행한다는 것이다. 그러므로 MC는 완전한 episode들로 부터 학습을 하며 이를 no bootstrapping(추측치로 업데이트 하기)이라고 부른다.
Goal : Prediction 문제이므로 policy는 π로 정해져 있고, 이를 통해 나온 episode들을 통해 vπ 를 학습하는 것
return은 Gt=Rt+1+γRt+2+ ... + γT−1RT 와 같이 정의 했으며 vπ(s) = Eπ [Gt | St = s] 로 정의했었다.
MC 방법은 state들을 방문한 것을 바탕으로 다시 크게 First와 Every로 나뉘게 된다.
First- Visit MC Policy Evaluation
terminate까지 도달하기 위해서 state들을 여러번 방문할 수 있는데, , 이때 해당 state에 처음 접한 후 얻은 return 값의 평균을 사용하여 구한다.
Every-Visit MC Policy Evaluation
First와는 달리 state들을 방문할 때마다 return을 계산하고 이를 평균을 내는 방식이다. 보통 first-visit을 사용한다고 한다.
Incremental mean
평균을 구하는 식은 다음과 같이 현재의 값을 뺀 평균의 식으로 바꿀 수 있게 된다. 이를 통해 incremental update를 할 수 있게 된다.
따라서 이를 이용해서 MC 방법에서 V를 계산하는데 사용할 수 있다.
N(S)는 episode를 수행한 횟수에 해당하며 에피소드를 수행하고 나서 v(s)를 바로바로 추정가능하게 된다.
non-stationary 문제의 경우에는 평균을 낼 때 이전의 횟수를 사용하는 것이 아니라 일정한 값인 a로 고정해서 계산을 한다.
Temporal-Difference Learning(TD)
TD방식도 episode들로 부터 직접적인 경험을 하면서 학습을 하는 알고리즘이며 model-free에서 사용한다. 하지만 MC와는 다르게 episode들이 완전히 끝나지 않아도 학습이 가능하며 DP에서 사용하던 bootstrapping 방법을 사용한다. 즉 MC방법과 DP 방법을 적절히 조합한 아이디어라고 할 수 있다. 그리고 추측치에서 다음 추측치를 추정함으로써 업데이트가 가능하다.
MC vs TD
MC와 TD에서 가장 다른 부분은 return Gt이다. MC에서는 종료가 된 episode들로 부터 학습을 하기 때문에 정확한 Gt값을 알 수 있다. 하지만 TD는 그렇지 않기 때문에 return Gt를 추정한 값을 사용해야 한다. 따라서 TD(0)이라고 가정했을 때(뒤에서 이 용어에 대해 자세히 설명한다.),Gt 에 해당하는 부분을 Rt+1+γV(St+1)로 바꿔서 사용하도록 한다.
빨간색 term을 TD target이라고 부르고, a 뒤에 있는 항을 TD error라고 부른다고 한다.
TD는 final outcome이 나오기 전에 학습을 할 수 있지만 MC는 결과가 나올 때까지 기다려야 한다. 하지만 TD는 바로바로 학습을 하지만 이 episode가 실제로 종료될 것이라는 보장이 없고, MC는 애초에 끝난 결과를 가지고 학습하므로 확실히 종료된다는 보장을 가지고 있게 된다.
Bias/Varaince Trade-off
v가 실제 Gt에 대해서 unbiased하다고 하면 TD target도 unbiased하다고 할 수 있다. 하지만 TD target은 추정치인 V(St+1)를 사용하기 때문에 bias가 생길 수 밖에 없다.
대신 TD target은 하나의 step에서 계산을 하기 때문에 작은 variance를 가지게 된다. 반면 MC는 episode가 어떤 state sequence로 이루어졌는가에 따라서 value function이 달라지기 때문에 variance가 높게 된다.
즉 종합해보면 MC는 높은 variance를 가지지만 bias가 아예 존재하지 않는다.(정확히 구해진 값들을 사용하기 때문에) 따라서 좋은 수렴 조건을 가지고 있으며, 초기값에 영향을 받지도 않는다.
TD는 낮은 variance를 가지고 있지만 bias가 생기게 된다. 보통 MC보다 더 효과적이고 TD(0)은 수렴을 하지만 항상 그렇다고 볼 순 없다. 또한 초기값에 영향을 받게 된다.
Batch MC and TD
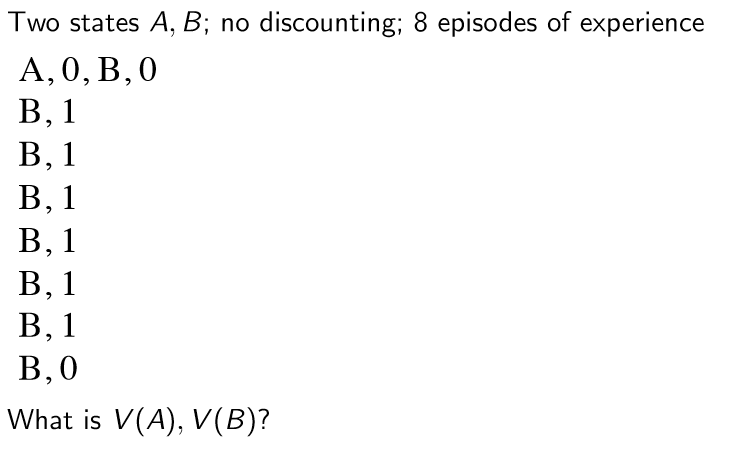
MC, TD 방식 모두 episode를 무한하게 반복하면 실제 value에 수렴할 수 있다. 하지만 batch 방식으로 유한한 episode들을 가지고 학습을 하면 어떻게 될까?
위 예시를 통해서 살펴보도록 한다. 이 예시에서는 8개의 episode들이 있고, 첫번째 episode에서는 A가 reward 0을 받고, B로 가서 reward 0을 받게 된다. 2~7번째 episode들에서는 B에서 reward 1을 받고, 마지막엔 0을 받게 된다.
즉 위 내용을 종합해보면 A는 100% 확률로 B로 가게 될 것이고 이 때 return은 0이 될 것이다.
그러므로 MC에서는 A는 1번 episode에서만 나타나고 이 때 최종 보상이 0이기 때문이다. TD에서는 다른 episode들이 진행이 되면서 A의 value도 같이 업데이트가 될 것이다.
MC는 최종적으로 완료한 episode들의 보상을 사용해서 학습을 하므로 V(A) = 0이 되었다. TD(0) 방식은 max likelihood Markov 방식을 사용하여 수렴하는 알고리즘이기 때문에 V(A) = 0.75가 된다.
이를 보아 TD는 MDP 특성을 가지는 알고리즘이므로 MDP 환경에서 더 유용하고, MC는 그렇지 않기 때문에 MDP가 아닌 환경에서 더 유용하게 된다.
다음은 backup과 bootstrapping에 따른 RL의 분류이다.
TD(λ)
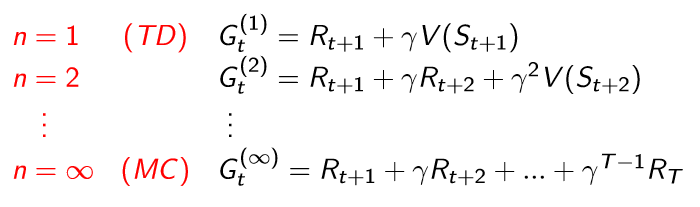
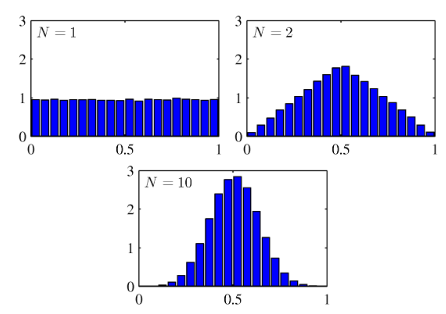
지금까지 설명한 TD들은 TD(0)에 해당하는 것들이었다. 이제 이를 확장해서 TD(λ)로 사용하도록 한다. TD는 guess로 guess를 예측하는 것인데, λ는 steps들에게 얼만큼의 가중치를 부여할지에 대한 값이다. 즉 수식으로 표현하면 다음과 같다.
n=1에 해당하는 것이 우리가 지금까지 보았던 TD(0)에 해당한다. n=2는 G(2)t와 같이 표현이 될 것이다. 그리고 n이 무한대까지 간다면 이는 종료가 될 때까지 진행한다는 것과 같으므로 MC와 같아지게 된다.
따라서 적당한 n을 잘 선택할 수 있으면 TD와 MC의 장점을 모두 취할 수 있게 된다.
n step에서 n을 고르는 방법은 크게 두 가지 방법이 있다.
Forward-view TD(λ)
MC와 TD의 절충안이 n-step인 것처럼, 여러 개의 n-step을 선택하여 이의 평균을 취하면 각 n-step의 장점을 모두 가질 수 있게 된다. 이 때, 단순히 산술평균을 사용하는 것이 아니라 λ라는 weight를 이용해서 가중 평균을 취하도록하고 이를 Forward-view라고 한다.
Backward-view TD(λ)
이제는 다시 forward-view TD(λ)에서 time-step마다 update할 수 있는 방법을 알아본다. 여기서 eligibility trace라는 개념이 나오게 된다. 이는 과거에 방문했던 state 중에서 현재 얻게 되는 reward에 영향을 주는 state를 판단해, 현재 얻게 되는 reward를 해당 state에 나누는 것이다.
이 때, 영향을 준 것 같은 idx를 credit이라고 하고, 이 credit을 배정할 때 다음 두 개를 사용한다.
적록색약은 빨간색과 초록색의 차이를 거의 느끼지 못한다. 따라서, 적록색약인 사람이 보는 그림은 아닌 사람이 보는 그림과는 좀 다를 수 있다.
크기가 NxN인 그리드의 각 칸에 R(빨강), G(초록), B(파랑) 중 하나를 색칠한 그림이 있다. 그림은 몇 개의 구역으로 나뉘어져 있는데, 구역은 같은 색으로 이루어져 있다. 또 같은 색상이 상하좌우로 인접해 있는 경우에 두 글자는 같은 구역에 속한다. (색상의 차이를 거의 느끼지 못하는 경우도 같은 색상이라 한다.)
예를 들어, 그림이 아래와 같은 경우에
RRRBB
GGBBB
BBBRR
BBRRR
RRRRR
적록색약이 아닌 사람이 봤을 때 구역의 수는 총 4개이다. (빨강 2, 파랑 1, 초록 1)하지만, 적록색약인 사람은 구역을 3개 볼 수 있다. (빨강, 초록 2, 파랑 1)
그림이 입력으로 주어졌을 때, 적록색약인 사람이 봤을 때와 아닌 사람이 봤을 때 구역의 수를 구하는 프로그램을 작성하시오.
입력:
첫째 줄에 N이 주어진다. (1<=N<=100)
둘째 줄부터 N개 줄에는 그림이 주어진다.
출력:
적록색약이 아닌 사람이 봤을 때의 구역의 개수와 적록색약인 사람이 봤을 때의 구역의 수를 공백으로 구분해서 출력한다.
풀이방법:
dfs를 사용해서 구역을 구분하는 문제인데, 적록색약인 사람과 그렇지 않은 사람을 구분하기 위해 각각 dfs 함수를 구현해 주면 된다. 그리고 또한 입력을 받을 때 G나 R을 R이나 G로 바꿔주어 적록색약인 사람들을 구분하면 된다. 이번 풀이에서는 G를 R로 바꾸었다.
Youtube에 있는 David Silver의 Reinforcement Learning 강의를 보고 작성하였습니다.
3. Planning by Dynamic Programming
Model Free : environment에 대한 정보를 가지고 있지 않을 경우
Model Based : environment에 대한 모델이 있는 경우
이러한 경우에 대해서 Planning, Dynamic Programming을 사용한다.
Introduction
What is Dynamic Programming?
알고리즘 문제 기법에서 사용하는 DP, 동적 계획법과 같은 뜻을 가지고 있다. 복잡한 문제에 사용하는 방법으로써 문제를 여러 subproblem으로 쪼갠 뒤에 이 문제를 해결하고 합쳐가면서 풀어가는 방식이다.
다음과 같이 두 가지 특성을 가지는 문제에 대해서 DP를 사용하는 것이 일반적이다.
Optimal substructure
Optimal한 해는 subproblems들로 분해될 수 있다는 것이다.
Overlapping subproblems
Subproblem 들이 많이 사용되어서 이를 저장해두었다가 사용할 수 있다.
MDP는 위 두 가지 속성을 가지고 있으므로 DP를 사용할 수 있다.
Bellman equation은 재귀적으로 분해가 가능하고, value function은 해를 저장하고 재사용할 수 있도록 한다.
Planning by Dynamic Programming
DP는 MDP의 모든 것을 알고 있다고 가정한다. 즉 Planning 문제를 해결하는 것이다.
DP는 크게 두 가지 방법으로 나뉘게 된다.
Prediction
value function을 학습하는 것
MDP, policy가 있을 때 그 policy를 따를 경우의 value function이다.
policy evaluation 문제
Control
optimal 한 policy를 찾는 문제
MDP만 있고 optimal 한 policy를 찾아야 한다.
policy Iteration, value Iteration
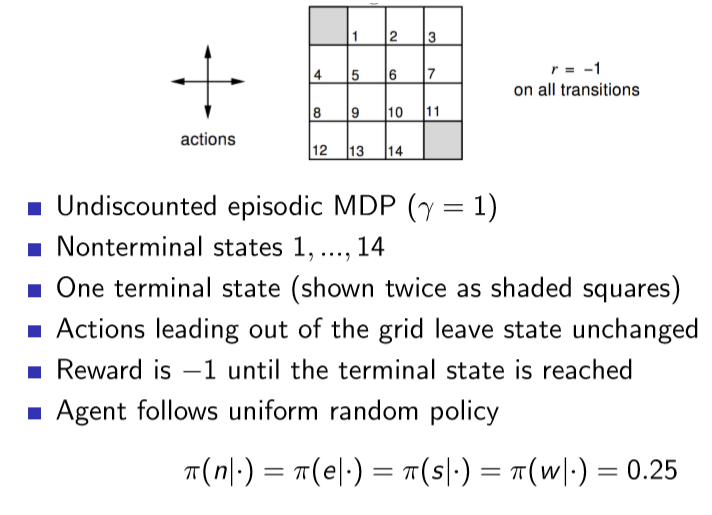
Policy Evalutation
주어진 policy를 평가하는 문제, 이 policy를 따라 간다면 return을 얼마 받는가. 즉 value function을 찾는 문제
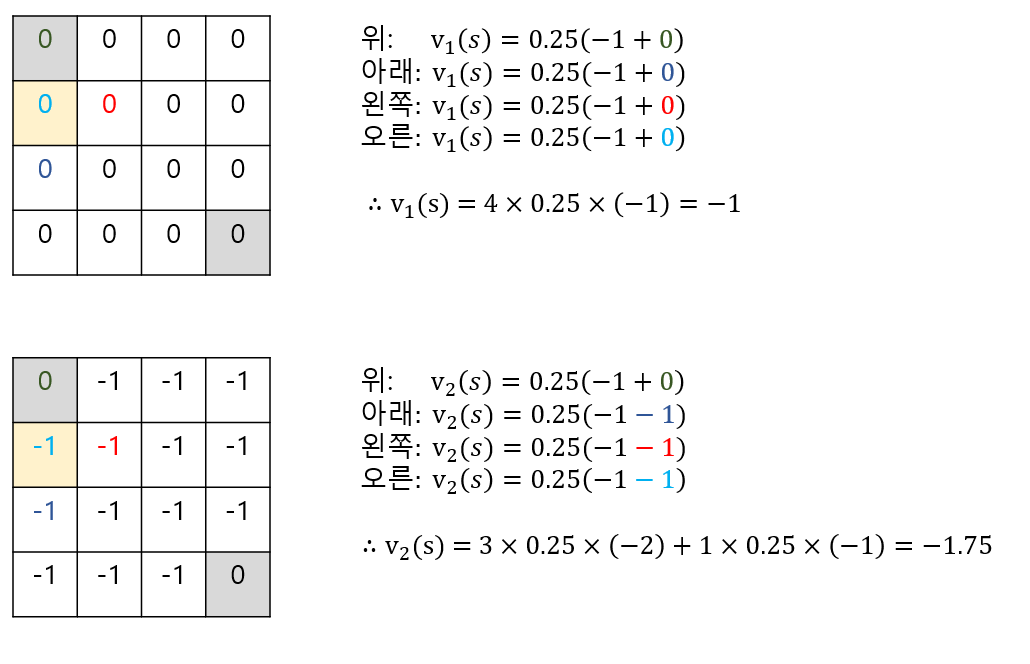
초기 value 값을 랜덤하게 초기화 한 후 Bellman Equation을 이용해서 다음 상태 s'를 이용해서 각각의 상태 s의 value 값을 반복적으로 업데이트 한다. 이 때 synchronous backup을 사용한다.
Example
위와 같이 계속해서 반복하다보면 정책이 수렴하는 것을 알 수 있다.
Policy Iteration
위와 같이 반복적인 업데이트를 통해서 모든 상태 s에 대해 value 값을 구할 수 있다.(Evaluate) value 값이 최대가 되는 방향으로 greedy하게 행동하면 초기에 만들었던 Random한 Policy를 개선된 Policy로 만들 수 있다.(Improve) 위와 같은 예시에서는 금방 최적의 Policy로 찾아가는 것을 알 수 있다.
따라서 일반적인 경우에는 Policy를 evaluation해서 value들을 구하고, 그 value들을 바탕으로 Policy를 improvement하는 방향으로 발전시키면 된다.
그런데 과연 greedy 하게 정책을 개선시키는 것이 성능을 항상 좋게 만들까?
다음과 같은 이유들로 항상 그렇다고 하며, 수렴을 하는 포인트는 optimal 하다고 한다.
Modified Policy Iteration
하지만 꼭 수렴할 때까지 계속해서 반복해서 진행해야 하는가? 에 대한 의문을 가질 수 있다. 실제로 무한히 반복해서 수렴할 때까지 진행을 하지 않고, k번을 반복해서 그 점을 사용해도 충분히 합리적으로 사용할 수 있다고 한다.
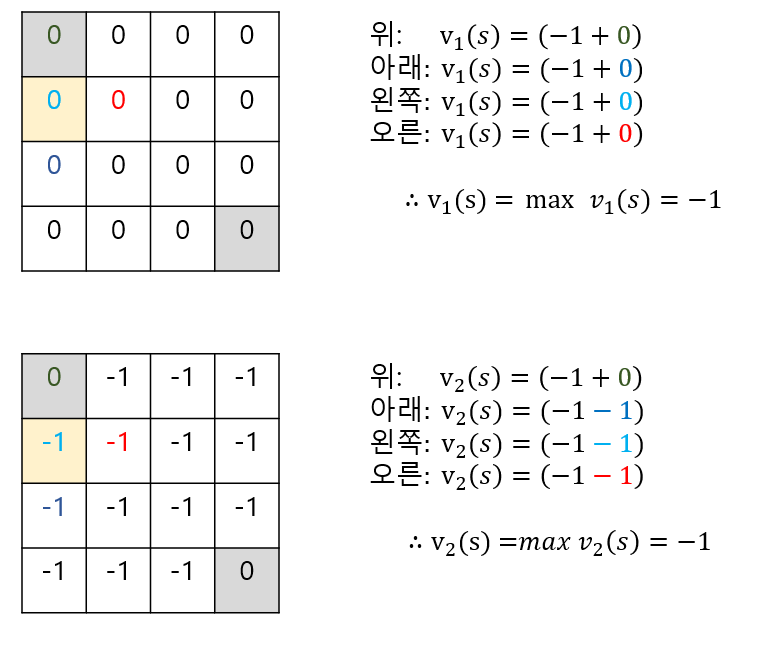
Value Iteration
Value Iteration은 Policy Iteration과는 다르게 Bellman Optimal Equation을 이용하는 것이다.
Deterministic Value Iteration
subproblem의 solution을 알면 Bellman Optimal Equation을 이용해서 s에서의 solution을 알 수 있다.
*Youtube에 있는 David Silver의 Reinforcement Learning 강의를 보고 작성하였습니다.
Markov Decision Process을 지난 강의에서 배웠던 내용으로 설명하면, 강화학습을 위해 환경을 완전하게 알고 있는 것을 의미한다. 즉 full observable해야 한다. 이러한 이유로 RL의 거의 모든 문제는 MDP로 설계가 되어 있고, MDP하지 않다면 MDP하도록 조건을 더 추가시켜줘야 한다.
Markov Property
이전 강의에서 잠시 다뤘던 내용이다. "Markov하다" 라는 것은 다음 상태는 과거 상태에는 독립적이고 현재 상태에만 종속을 한다는 것이다. 즉 다음과 같다.
예시로 설명하면 다음과 같다. 현재 내가 장기(체스)를 두고 있다고 하자. 그러면 지금 현재 기물들이 어떻게 놓여져 있는지가 다음 수를 두는 것에 영향을 줄 뿐, 이전에 어떻게 움직였는지는 전혀 다음 수에 도움이 되지 않는다.
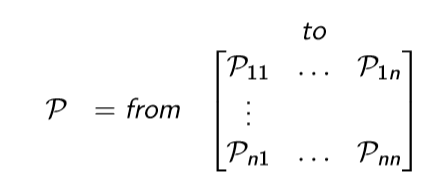
State Transition Matrix
Markov를 설명하기 위해 도움이 되는 정의 중 하나이다. state transition probability는 Markov한 state s에서 다음 상태 s'으로 이동할 확률을 뜻하고, Matrix는 이러한 확률을 행렬꼴로 모아둔 것이다.
Markov Process
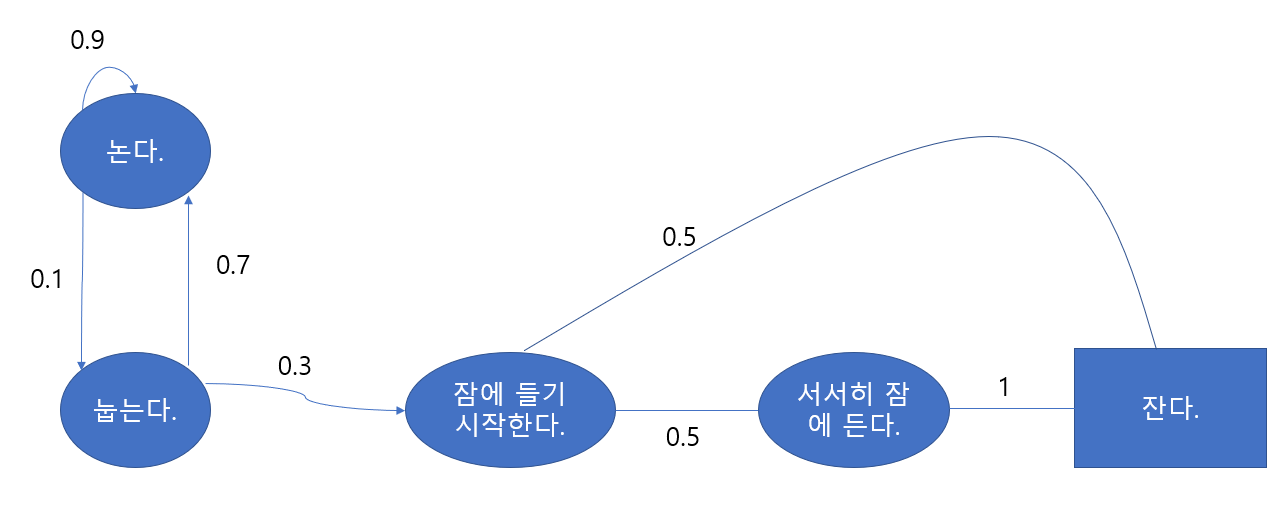
앞으로 다룰 Markov 대한 성질들의 가장 기본이 되는 과정이다. memoryless random process라고 하는데, 이는 Markov의 특징을 말하는 것이다. Markov Process는 <S,P>로 정의되고, S는 state들의 집합, P는 state transition probability matrix이다. 다음은 아기가 잠에 드는 과정을 도식화한 것이다.
상태천이행렬이며, 빈 공간은 0이라 생각한다.
여기서 각 행동은 다 타원형으로 표시되어 있고, '잔다' 라는 상태만 네모로 표시되어 있는데 이는 terminate state, 종료 상태를 의미한다. 각 행동으로 이동하는 화살표에 확률이 써져 있는데, 아직은 모든 상태는 확률에 의해서만 바뀐다. 즉, '눕는다.' 라는 상태에서는 70% 확률로 논다. 라는 상태로 이동하고, 30%으로 확률로 잠에 들기 시작하는 상태로 이동하는 것이다.
상태를 이동하는 상황이 여러가지 있는데 이들을 episodes라고 부른다.
Markov Reward Process
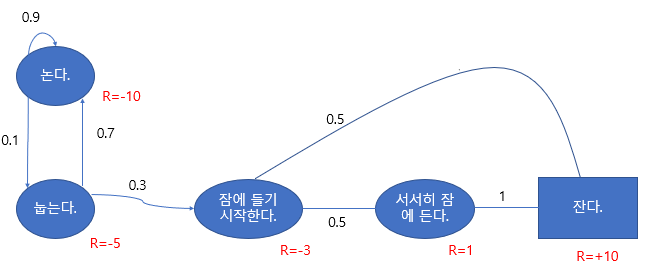
Markov Process에 Reward function이 추가된 개념으로 <S,P,R,r>와 같으며 R은 reward function으로 Rs=E[Rt+1|St=s]이고, r 은 감쇠인자로써, 0과 1 사이의 값을 가진다. 이 단계에서 새로 정의되는 개념들이 있어 이를 정리하고 진행한다.
Reward가 추가 되었다.
Return
return Gt는 t 시간이 지난 뒤에 얻은 총 보상을 의미한다.
Why discount? 감쇠인자를 사용하는 이유는 무엇일까?
수학적으로 편리하다. 감쇠 인자를 0과 1 사이의 값으로 설정을 했기 때문에 return 값이 무한히 커지는 것을 막을 수 있다. 즉 bounded하게 만들 수 있다.
사람이 선호하기 때문이다.
만약 누군가 당신에게 지금 커피를 사줄지? 아님 10달 뒤에 커피를 사줄지 물어볼 수 있다.
대부분 지금 사달라고 할 것이다.
불확실성을 표현하기 위해서
위의 예시로 생각하보면 지금 사달라고 선택을 하는 이유가 10달 뒤에 진짜 커피를 사줄지는 불확실했기 때문일 것이다.
Value Function
value function은 현재 상태 s로 부터 시작했을 때 return의 기댓값을 의미한다.
지금까지 예시에서 감쇠인자 값을 0이라 가정했을 때, 다음과 같이 value function 값이 구해진다.
지금은 state들이 단순해서 충분히 손으로도 계산을 할 수 있지만 더 많은 state들이 복잡하게 연결된다면 손으로 하는 것은 어렵게 될 것이다. 따라서 이를 위해 Bellman Equation이라는 것을 사용한다.
Bellman Equation
value function을 다음과 같이 표현할 수 있다.
Bellman Equation으로 value function을 그림으로 표현하면 다음과 같다. 현재 상태의 value function은 현재 보상을 받은 뒤(Rs)에 다음 상태들의 value function 합(sigma Pss'v(s'))에 감쇠 인자를 곱한 값을 얻는다는 것이다.
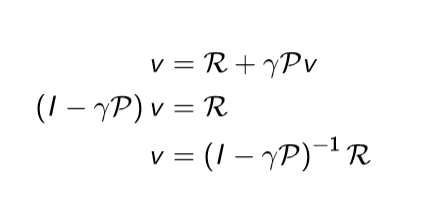
따라서 이와 같이 value function으로만 구성된 식을 matrix form으로 변환한다면 역행렬을 통해서 한번에 구할 수 있게 된다.
하지만 이 연산은 O(n^3)에 해당하는 복잡도를 가지고 있다. 따라서 작은 MRP에서만 계산이 가능하고, 큰 경우는 DP, Monte-Carlo 방법등으로 구하게 된다.
Markov Decision Process
Markov Reward Process에서 action이 추가된 단계이다. <S,A,P,R,r>와 같이 정의 하며 A는 action들의 집합을 의미한다.
또한 action이 추가되었기 때문에 상태천이행렬 P와, reward function R에 a에 관한 식이 들어가게 되었다. 따라서 슬라이드에서 소개한 내용에 action을 추가하면 다음과 같다.
그리고 Action이 생김에 따라서 몇 가지 용어를 정의해야 한다.
Policy
정책 π 는 현재 주어진 상태에서 action a를 수행할 분포를 의미한다.
따라서 정책은 agent 행동을 정의한다고 할 수 있다. 그리고 이 정책을 이용해서 상태천이행렬 P와 reward function R을 다음과 같이 다시 정의할 수 있다.
Value Function
state-value function
state value function은 현재 상태 s가 주어졌고, 정책을 따른다고 했을 때 얻을 수 있는 return의 기댓값을 의미한다.
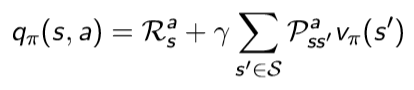
action-value function
action value function은 현재 상태가 s이고, action a를 한다. 그리고 정책을 따른다고 했을 때, 얻을 수 있는 return의 기댓값을 의미한다.
Bellman Expectation Equation
위에서 정의했던 state value function과 action value function을 Bellman equation을 사용하기 위해서 Immediate reward와 future reward 형태로 분해할 수 있게 된다.
하지만 위 식으로는 실제로 구현을 하는 것이 힘들기 때문에 직접 구현을 위해 조금 더 명백한 형태로 변형이 필요하게 됩니다.
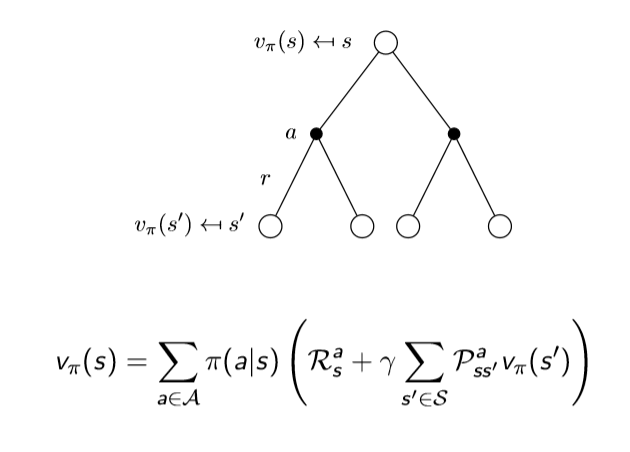
위 그림에서 흰색 원은 state를 의미하고, 검은색 원은 action을 의미합니다. 위 그림을 해석해 보면 현재 상태 s에서 가능한 action들은 2개가 있는 것입니다.(실제로는 더 많은 검은색 점이 있을 수 있습니다.) 그러면 agent가 선택한 당시의 정책에 따라 action을 할 확률이 정해질 것이고, 그 때마다 action-value function을 구할 수 있게 됩니다.
따라서 위 그림으로 보아 우리는 현재 state s에서의 state value function을 구하기 위해서 각 action을 할 확률(정책)과 그 action에서 발생하는 value state function을 곱한 것들의 합으로 표현을 할 수 있게 됩니다.
즉 다음과 같이 식을 얻을 수 있습니다.
하지만 아직 이 형태로는 현재 state value function과 다음 state value function과의 관계를 알 수 없습니다. 그러므로 action value function에 대해서 식을 전개해보도록 하겠습니다.
state s에서 action a를 했을 때의 그 action에 대한 value는 두 가지로 나뉘게 됩니다. state s에서 action a를 했을 때의 reward와 그 다음 state의 value function입니다. 그런데 이 중 다음 state value function은 다음 시점의 value function이므로 감쇠 인자를 적용시켜줘야 합니다. 또한 상태가 변한 것이므로 상태 전이 확률도 적용시켜줘야 합니다. 따라서 다음과 같이 식을 구성할 수 있습니다.
따라서 위 두 내용을 모두 한 번에 합치면 다음과 같이 됩니다.
지금까지 state value function을 설명하기 위해 전개를 한 것처럼 이를 action value function을 설명하기 위해 전개를 진행하면 다음과 같이 됨을 알 수 있습니다.
이제 식을 state, action value function 하나씩으로만 표현을 할 수 있기 때문에 이전에 matrix form으로 변경해서 구했떤 것처럼 구할 수 있게 된다.
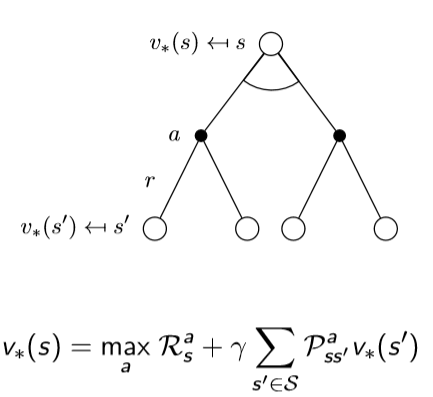
Bellman Optimal Equation
강화학습은 기본적으로 최대의 보상을 얻는 정책을 찾는 것을 목표로 하고 있기 때문에 얻을 수 있는 기댓값보다는 최대 보상을 얻을 수 있는 것이 더 중요합니다. 따라서 앞서 정의했던 value function들을 다음과 같이 정의할 수 있습니다.
위의 식으로 optimal한 value function을 구할 수 있다면 주어진 state에서 value가 가장 높은 action을 선택할 수 있고, 이를 통해서 optimal한 정책을 구할 수 있게 됩니다. optimal한 값을 항상 얻도록 만들어야 하므로 다음과 같이 정책을 수식을 적을 수 있습니다.
앞서 Expectation Equation에서 진행했던 것처럼 Optimal도 진행을 할 수 있고 다음과 같이 얻을 수 있다.
하지만 Bellman Optimality Equation은 max 연산때문에 non-linear하다. 그렇기 때문에 일반화된 해법을 제공할 수는 없고, 이를 위한 여러가지 다른 방법들을 제시한다.
차세대 영농인 한나는 강원도 고랭지에서 유기농 배추를 재배하기로 하였다. 농약은 쓰지 않고 배추를 재배하려면 배추를 해충으로부터 보호하는 것이 중요하기 때문에, 한나는 해충 방지에 효과적인 배추흰지렁이를 구입하기로 결심한다. 이 지렁이는 배추근처에 서식하며 해충을 잡아 먹음으로써 배추를 보호한다. 특히, 어떤 배추에 배추흰지렁이가 한 마리라도 살고 있으면 이 지렁이는 인접한 다른 배추로 이동할 수 있어, 그 배추들 역시 해충으로부터 보호받을 수 있다.
(한 배추의 상하좌우 네 방향에 다른 배추가 위치한 경우에 서로 인접해있다고 간주한다.)
한나가 배추를 재배하는 땅은 고르지 못해서 배추를 군데군데 심어놓았다. 배추들이 모여있는 곳에는 배추흰지렁이가 한 마리만 있으면 되므로 서로 인접해있는 배추들이 몇 군데에 퍼져있는지 조사하면 총 몇 마리의 지렁이가 필요한지 알 수 있다.
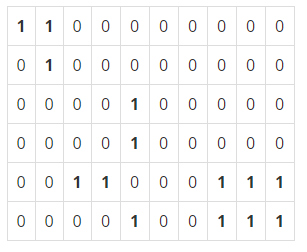
예를 들어 배추밭이 아래와 같이 구성되어 있으면 최소 5마리의 배추흰지렁이가 필요하다.
(0은 배추가 심어져 있지 않는 땅이고, 1은 배추가 심어져 있는 땅을 나타낸다.)
입력:
입력의 첫 줄에는 테스트 케이스의 개수 T가 주어진다. 그 다음 줄부터 각각의 테스트 케이스에 대해 첫째 줄에는 배추를 심은 배추밭의 가로길이 M(1<=M<=50)과 세로길이 N(1<=N<=50), 그리고 배추가 심어져 있는 위치의 개수 K(1<=K<=2500)이 주어진다. 그 다음 K줄에는 배추의 위치(0<=X<=M-1),Y(0<=Y<=N-1)가 주어진다.
출력:
각 테스트 케이스에 대해 필요한 최소의 배추흰지렁이 마리 수를 출력한다.
풀이방법:
dfs를 전형적인 문제이다. 탐색을 진행하다가 1인 점을 만나게 되면(그리고 이전에 방문을 하지 않았다면) dfs 함수에 들어가서 주위에 있는 1의 위치들을 모두 방문하는 방식으로 진행하면 된다. 주위의 1을 모두 방문한 뒤에 answer를 1증가 시키며 다시 탐색을 진행하여 1이지만 방문을 안한 점을 찾아 같은 작업을 반복해주면 된다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
import sys
sys.setrecursionlimit(10000)
dx=[0,0,1,-1]
dy=[1,-1,0,0]
def dfs(x,y):
for i inrange(4):
nx=x+dx[i]
ny=y+dy[i]
if0<= nx < M and0<= ny < N:
if worm[nx][ny] andnot visited[nx][ny]:
visited[nx][ny] = True
dfs(nx,ny)
T=int(input())
for _ inrange(T):
M,N,K=map(int,input().split())
worm = [[0for _ inrange(N)]for _ inrange(M)]
visited = [[False for _ inrange(N)]for _ inrange(M)]