아래 모든 내용들은 Christopher Bishop의 pattern recognition and machine learning에서 더 자세히 볼 수 있습니다.
1.4 차원의 저주
- 지금까지는 입력변수의 범위가 1차원 데이터였지만 현실에는 이러한 경우는 거의 없다.

-
이 데이터는 오일, 물, 가스가 혼합되어 운반되는 송유관에서 측정된 데이터다.
-
이 데이터는 총 12 차원의 입력 벡터로 구성되어 있다.
-
위 그림은 x6, x7의 차원을 표현한 산포도이다.
-
점의 색깔은 데이터의 클래스를 의미한다.
-
x에 대해서 이 데이터가 어떤 클래스에 속할지를 판단해야 하는 문제이다.
-
-
가장 단순한 접근법은 입력 공간을 같은 크기의 여러 칸들로 나누는 것이다. x가 속한 셀 내에서 가장 많은 클래스를 확인한 뒤 그 클래스로 분류를 하는 방법이다.
-
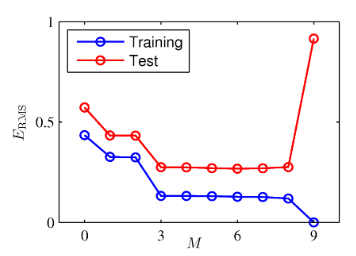
이 방법은 입력 변수가 더 많은 경우를 고려할 때 셀의 개수가 지수승만큼 증가하게 된다.

-
판별 함수를 생각해보면 앞서 사용한 방식을 사용하면 구해야 할 차원 D^M까지 증가하게 된다.

-
-
고차원에서 발생할 수 있는 심각한 문제를 차원의 저주(curse of dimensionality)라고 부른다.
-
저차원 공간에서 얻은 아이디어가 고차원 공간에서 반드시 적용되는지는 않다.
-
고차원 입력값에 대해 사용할 수 있는 효과적인 패턴 인식 테크닉이 존재하긴 함.
-
실제 세계의 고차원 데이터들의 경우에 유의미한 차원의 수는 제한적이다.
-
실제 세계의 데이터는 보통 매끈한 특성을 가지고 있다.
-
-
1.5 결정 이론
-
결정 이론 : 불확실성이 존재하는 상황에서 의사 결정을 내려야 할 때 최적의 의사 결정을 내릴 수 있도록 하는 것
-
입력 벡터 x와 타깃 변수 벡터 t가 존재하는 상황에서 새로운 입력 벡터 x가 주어지면 타깃 변수 벡터 t를 예측하는 문제가 있다고 하자.
- p(x,t)는 불확실성을 요약해서 나타내 줄 것이며 이 것을 찾아내는 것은 추론(inference) 문제의 대표적인 예시이다.
-
이런 확률 정보를 바탕으로 최적의 결정을 하려고 하는데 이를 결정 단계라고 한다.

1.5.1. 오분류 비율의 최소화
-
잘못된 분류 결과의 숫자를 가능한 줄이는 것이 목표이다. 이를 위해 x를 가능한 클래스들 중 하나에 포함시키는 규칙이 필요하다.
-
이 규칙은 입력 공간을 결정 구역이라는 Rk들로 나누게 될 것이며 Rk에 존재하는 포인트들은 클래스 Ck에 포함될 것이다.
-
이때 각 구역의 경계면을 결정 경계, 결정 표면이라고 부른다.
-
-
잘못 분류할 결과를 확률 식으로 표현할 수 있다.

- 따라서 이를 최소화하는 방향으로 모델을 설계해야 한다.
1.5.2. 기대 손실 최소화
-
현실적으로 오분류의 수를 줄이는 것으로는 부족하다.
-
따라서 암의 진단 예제의 경우에서 오분류를 하는 경우를 생각해보자.
-
case1 : 실제로 암이 아닌데 암이라고 진단할 경우
- 환자의 기분은 나쁠 수 있지만 추가 검사를 통해서 아니라는 것을 밝혀낼 수 있다.
-
case2 : 실제로 암인데 암이 아니라고 진단할 경우
- 이 경우에는 제 때에 치료를 받지 못하게 되어 죽음이라는 결과를 얻을 수 있다.
-
-
즉 case1보다 case2가 심각한 경우이므로 case2에 더 강한 페널티를 부여하는 것이 필요하다.
-
-
이를 위해 cost function, loss function이라는 개념을 도입해서 이러한 문제들을 공식화할 수 있다.
-
하나의 샘플 x가 실제로는 특정 클래스 Ck에 속하지만 이 샘플의 클래스를 Ci로 선택할 때 들어가는 비용이라고 정의한다.
-
모든 경우에 대한 Loss를 정의한 것을 loss matrix라고 한다.
-
-
Loss 함수를 최소화하는 해가 최적의 해인데 Loss 함수에 대한 평균값을 최소화하는 방법을 사용한다.

-
각각의 x 값은 결정 구역 Rj들 중 하나에 독립적으로 포함된다. 그렇기 때문에 에러 값이 최소가 되는 Rj를 선택해야 한다.
-
결국 x에 대해서

를 최소화하는 클래스를 찾으면 된다.

로 치환 가능하고, p(x)는 클래스마다 동일하다고 생각하고 생략한다.
-
새로운 xnew가 들어왔을 때, 이 식을 사용한다.
-
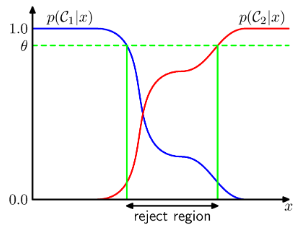
1.5.3 거부 옵션
- 사후 확률 또는 결합 확률이 1에 가까운 것이 아니라 클래스 별로 비슷할 경우 분류에 대한 에러가 커지게 된다.
-
이러한 범위에 존재하는 x에 대해 특정한 클래스로 할당을 하는 것이 힘들기 때문에 결정을 회피하게 되는데 이를 reject option이라고 한다.
-
즉 그림을 보면 특정 수준(threshold)를 넘지 못하면 클래스 분류를 하지 않는 것이다.
- 1/K<theta<1로 고려를 하며 theta를 조절해 거부되는 예시의 수를 조절할 수 있다.
1.5.4. 추론과 결정
-
지금까지 분류 문제를 두 개의 단계로 나누어서 알아보았다.
-
추론 단계 : 훈련 집단을 활용하여 p(Ck|x)에 대한 모델을 학습시키는 단계
-
결정 단계 : 학습된 사후 확률들을 이용해서 최적의 클래스 할당을 시행
-
-
결정 문제를 푸는 데에는 세 가지 다른 접근법이 있으며, 복잡도가 높은 순으로 설명한다.
-
생성 모델(generative model)
-
각 클래스에 대해서 조건부 확률 밀도와 사전 확률을 따로 구해 사후 확률을 추론함.

-
결합 분포를 모델링한 후 정규화를 통해 사후 확률을 구할 수 있음.
-
이렇게 입력값과 출력값의 분포를 모델링하는 방식을 생성 모델이라고 하며, 이 분포로부터 새로운 샘플을 생성할 수 있는 능력이 있다.
-
-
판별 모델(discriminative model)
- 사후 확률을 계산하는 추론 문제를 풀어낸 후에 결정 이론을 적용하여 각각의 입력 변수 x에 대한 클래스를 구한다. 사후 확률을 직접 모델링하는 이러한 방식을 판별 모델이라고 한다.
-
판별 함수(discriminative function)
- 각각의 입력값을 클래스에 사상하는 판별 함수를 찾는다. 베이즈 확률 모델에 의존하지 않고 판별식을 찾아내는 방식이다.
-
세 가지 방식의 장단점에 대해서 논의해보자.
-
생성 모델
-
가장 복잡한 방식으로 x, Ck에 대해서 결합 분포를 찾아야 하는데 대부분의 사례에서 고차원이며 많은 훈련 집합을 필요로 한다.
-
이 모델의 장점은 이 식을 이용해서 데이터의 주변 밀도도 구할 수 있다. 이를 바탕으로 발생 확률이 낮은 새 데이터(outlier)를 발견할 수 있다.
-
-
판별 모델
-
사후 확률을 계산하는 방식이 생성 모델보다 간편하다.
-
클래스별 조건부 분포는 사후 확률에 많은 영향을 주지 않는다.
-
-
판별 함수
-
입력 공간을 결정 공간에 바로 매핑시키는 방식이다. 추론 단계와 결정 단계를 하나의 학습 문제로 합친 것이다.
-
확률론을 다루지 않으므로 사후 확률을 알지 못하게 된다.
-
-
- 사후 확률을 구하는 것의 유의미한 이유는 다음과 같은 이유들 때문이다.
-
위험의 최소화
-
Loss matrix가 시간에 따라 바뀔 수도 있다.
-
이는 사후 확률을 알고 있다면 쉽게 최소 위험 결정 기준을 구할 수 있다.
-
-
거부 옵션
- 사후 확률을 알고 있으면 거부 기준을 쉽게 구할 수 있다.
-
클래스 사전 확률에 대한 보상
-
클래스의 발현 비율이 다른 경우 이를 해결하기 위해 모델을 수정하게 된다.
-
수정된 데이터 집합을 사용하여 사후 확률에 대한 모델을 찾아내고 이를 통해 사전 집합을 구할 수 있다.
-
-
모델들의 결합
-
복잡한 문제를 좀 더 작은 문제로 나누어 해결하고 조합해서 사용된다.
-
간단한 모델로 나누고 이를 독립적으로 가정하고 식을 나열한다.
-
이를 조건부 독립이라고 하며 사후 분포에 대해서도 식을 전개할 수 있다.
-
하나의 어려운 결합 확률을 구하는 대신에 모델링이 쉬운 두 개의 사후 확률을 구해 이를 결합하는 것이다.

-
1.5.5 회귀에서의 손실 함수
-
지금까지 분류에 대해서 알아보았으니 회귀에 대해서도 손실 함수를 알아본다.

-
회귀 함수의 손실 함수는 위와 같은 식이며 분류와 같이 기대 손실 함수로 사용한다. 보통 L(t, y(x))를 {y(x)-t}^2으로 사용한다.

-
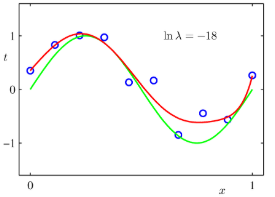
그래서 위와 같은 식을 얻게 되고 우리의 목표는 E [L]을 최소화하는 y(x)를 찾는 것이다. 이는 미분을 통해서 구할 수 있다.

-
이는 x가 주어졌을 때의 t의 조건부 평균으로써 회귀 함수라고 한다. 다음 그림을 참고하면 이해가 더 쉬울 것이다.

-
다른 방식으로도 도출할 수 있는데 최적의 해가 조건부 기댓값이라는 지식을 바탕으로 식을 전개할 수 있다.

-
E [t|x]를 빼고 더한 것으로 아무런 영향을 주진 않는다. 수학적으로 정답인 평균값이다.
-
y(x) 샘플 데이터로부터 만들어진 모델 함수로 우리가 예측한 근사 식이다.

-
전개식을 정리하면 위와 같아지게 된다. 크게 두 부분으로 나누어진다.
-
첫 번째 term은 모델 y(x)와 관련된 요소로 조건부 평균을 통해 최소화하는 항이다.
-
두 번째 term은 분산으로 샘플이 포함하고 있는 노이즈를 의미한다.
-
-
-
분류에서도 최적의 결정을 내리기 위한 방법들이 있었는데, 회귀에서도 다음과 같은 접근법들이 있다.
-
결합 밀도를 구하는 추론하는 방법, 이 식을 정규화하여 조건부 밀도를 구하고 최종적으로 조건부 평균을 구한다.
-
조건부 밀도를 구하는 추론 문제를 풀고 조건부 평균을 구한다.
-
훈련 데이터로부터 회귀 함수 y(x)를 구한다.
-
1.6 정보이론
-
이산 확률 변수 x를 고려해 보자. 이 변수가 특정 값을 가지고 있는 것을 확인했을 때 전해지는 정보량은 얼마만큼일까?
-
정보의 양은 '학습에 있어 필요한 놀람의 정도'로 해석하면 된다.
-
따라서 항상 일어나는 일은 0이 될 것이다.
-
그렇기 때문에 확률 분포 p(x)에 종속적이게 된다.
-
-
-
정보의 양을 h(x)라고 정의하면 정보는 결국 확률 함수의 조합으로 표현이 되게 될 것이다.

-
정보의 양을 나타내는 함수 h(x)는 확률 함수 p(x)의 음의 로그 값이다.
-
음의 부호는 정보량이 음의 값을 가지지 않도록 하기 위해 붙여졌다.
-
로그의 밑은 임의로 정하는데 보통 2를 선택하고 h(x)의 단위는 비트가 될 것이다.
-
-
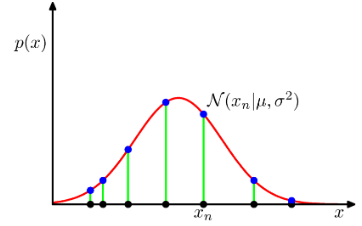
이때 전송에 필요한 정보량의 평균치는 다음과 같이 구할 수 있다.

-
이 식은 매우 중요한데 이를 엔트로피(entropy)라고 정의한다.
- 엔트로피는 평균 정보량을 의미하며, p(x)인 분포에서 h(x) 함수의 기댓값을 의미하게 된다.
-
noiseless coding theorem
- 엔트로피는 랜덤 변수의 상태를 전송하는데 필요한 비트 수의 하한선
-
N개의 동일한 물체가 몇 개의 통 안에 담겨 있다고 가정해 보자.
-
i번째 통 안에 ni개의 물체가 담기도록 한다.
-
전체 영역에 N개의 물체가 무작위로 놓여있다고 하고, 총 나타날 수 있는 가지 수는 N! 이 된다.
-
하지만 물체들이 어떤 순서로 놓여 있는지는 중요하지 않다. 개수만이 중요할 뿐이다. 따라서 총 가지 수는 다음과 같다.

-
이 것을 다중도(multiplicity)라고 부른다.
-
로그를 붙이고 적당한 상수를 넣어 식을 정리하자.

-
비율을 그대로 유진 상태에서 N->무한대를 취하고 **Stirling’s approximation** 을 적용하도록 한다.

-
이 것을 적용하면

-
통 안의 물체들의 순서를 미시 상태라 하며, ni/N으로 표현되는 통 각각이 가지고 있는 물체의 숫자 비율을 일컬어 거시 상태라 한다. 다중도 W를 거시 상태의 가중치라 일컫기도 한다.
-
N -> 무한대이고, ni/N이 고정된 상수라고 하면,

-
-
연속 변수일 때에는 식이 복잡하므로 생략하도록 한다.
1.6.1. 연관 엔트로피와 상호 정보
형태를 모르는 확률 분포 p(x)가 있다고 해보자. 그리고 이 확률 분포를 근사한 q(x)가 있다고 하자. 그러면 q(x)는 근사한 것이므로 정보량이 차이가 있다.
-
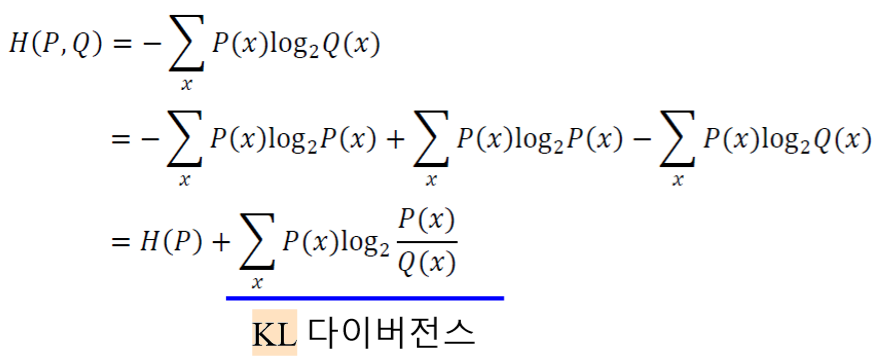
p(x)가 아닌 q(x)를 사용했기 때문에 추가적으로 필요한 정보량의 기댓값을 정의한다.

-
위 정의를 Kullback-Leibler divergence, KL divergence
-
근사 분포인 q(x)를 사용했기 때문에 정보량은 - ln q(x)을 사용한다.
-
하지만 데이터는 p(x)이므로 기댓값은 실 분포를 대상으로 구하게 된다.
-

을 만족한다. (non-symmetric) 그리고 항상 0보다 큰 값을 가진다.
- 만약 p(x),q(x) 이면 KL = 0이다.
-
KL divergence는 다음과 같이 유도할 수 있다.
-
정보 이론은 중요하지만 복잡한 내용이 많으므로 위와 같이 간략히 소개하고 추후 더 자세히 소개하는 시간을 가지도록 한다.
'Book > Machine Learning' 카테고리의 다른 글
| [ML]ch 4. Linear Models for Classification - part 1 (0) | 2020.02.10 |
|---|---|
| [ML]ch 3. Linear Models for Regression (0) | 2020.02.03 |
| [ML]ch 2. Probability Distributions (0) | 2020.01.27 |
| [ML]ch 1. Introduction-part 1 (0) | 2020.01.13 |
| [ML]chapter 0. Beginning (0) | 2020.01.13 |